Concept
Overview
BuddhaBot was done in conjuction with the Speculative Design and Robotics course, a part of the Digital Media program at the Georgia Institute of Technology. The project brief was to design a robot that affected public life in the city.
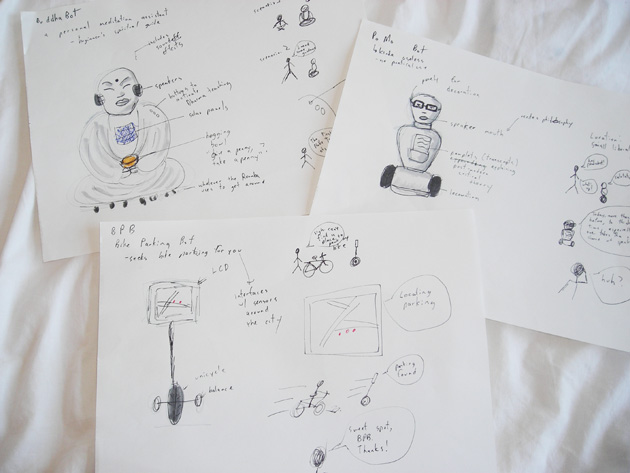
I went through an initial brainstorming session and came up with three different robots and use cases. There was Bike Parking Bot, a robot that would help users find parking spaces for their bikes. PoMo Bot, which would roam a college campus and recite post-modern critical theory. Lastly, there was BuddhaBot, a robot that would roam the city and help citizens meditate by finding quiet places to meditate and by expounding Buddhist teachings.
During critiques, BuddhaBot seemed to be the most practical concept and followed the project brief. To further flesh-out what BuddhaBot could do in the city (or rather, narrow its focus), I created a flowchart of technologies and use cases.
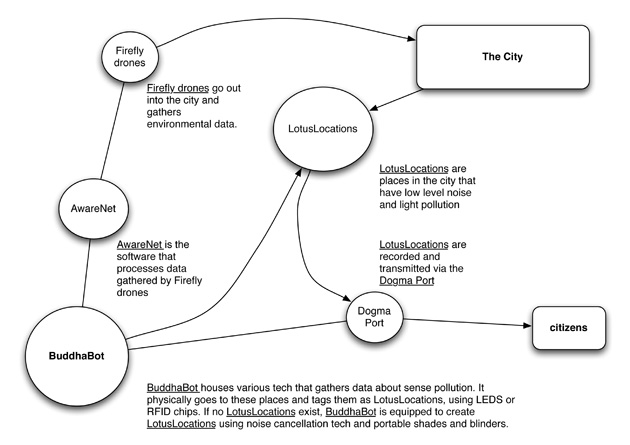
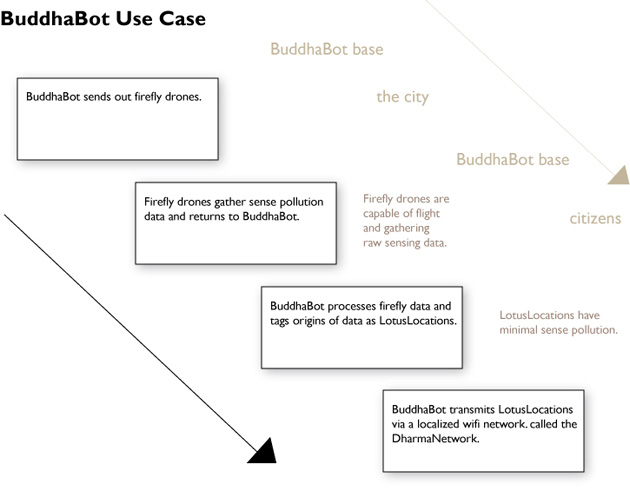
I imagined BuddhaBot to be a housing for various technologies. Robots designed like fireflies would gather data from the city inconspicuously and return to its home BuddhaBot. There would also be a computer on board of the robot that processed gathered data. This data would also be used to determine areas of the city that were quiet and had little foot traffic. These areas would be called LotusLocations. BuddhaBot would also be able to create a localized wi-fi network to transmit a map of LotusLocations. This network would be called DharmaNet. The next step in developing the BuddhaBot concept was to find existing technologies that BuddhaBot could be comprised of.
Technology
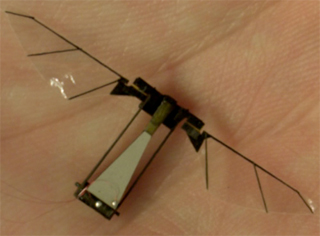 In the robotics issue of MAKE magazine I came across research being done at the Harvard Microrobotics Lab. They were building the world's smallest flying robots, whose aerodynamics was based on that of insects. What was intriguing about this flying robot was its size and the how the team at Harvard were able to build robots in less than two days. The firefly swarm that BuddhaBot would carry, could be based on these exisiting robotic research.
In the robotics issue of MAKE magazine I came across research being done at the Harvard Microrobotics Lab. They were building the world's smallest flying robots, whose aerodynamics was based on that of insects. What was intriguing about this flying robot was its size and the how the team at Harvard were able to build robots in less than two days. The firefly swarm that BuddhaBot would carry, could be based on these exisiting robotic research.
Also, while looking through a database of academic papers, I came across Sound Sense (being developed at Dartmouth University). Sound Sense was an audio event classification system that was designed for mobile phones, that most often had limited computing resources. It is a scalable framework, able to distinguish between voices, ambient noise and, etc.
In addition, I came across a robot system for wireless network emulation, that was being developed at Stony Brook University. The researchers were able to turn a group of Roombas into a portable WiFi network. Each individual Roomba acted as node in this network. This research could be the basis for DharmaNet. Each individual BuddhaBot in the city could act as as node in the information sharing network.
Learn about the process.